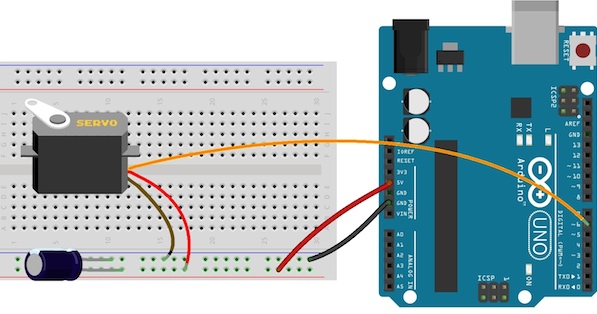
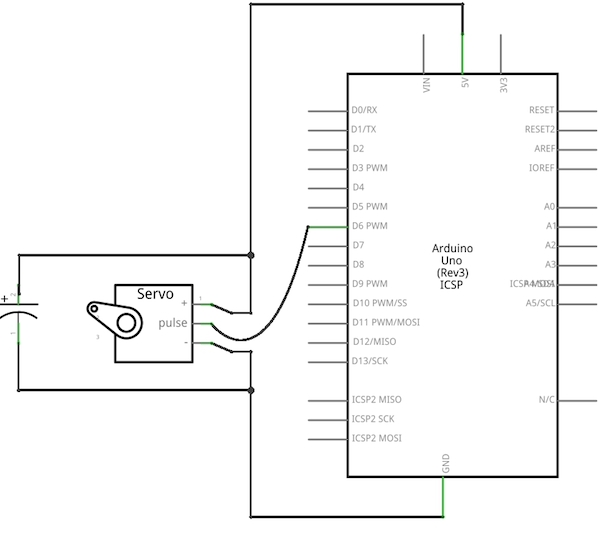
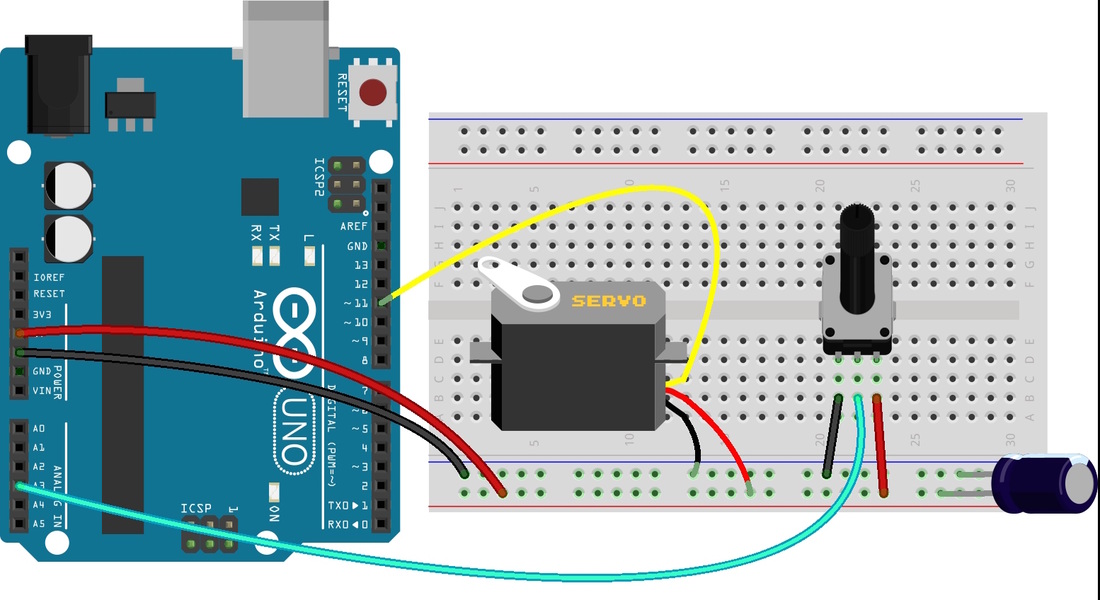
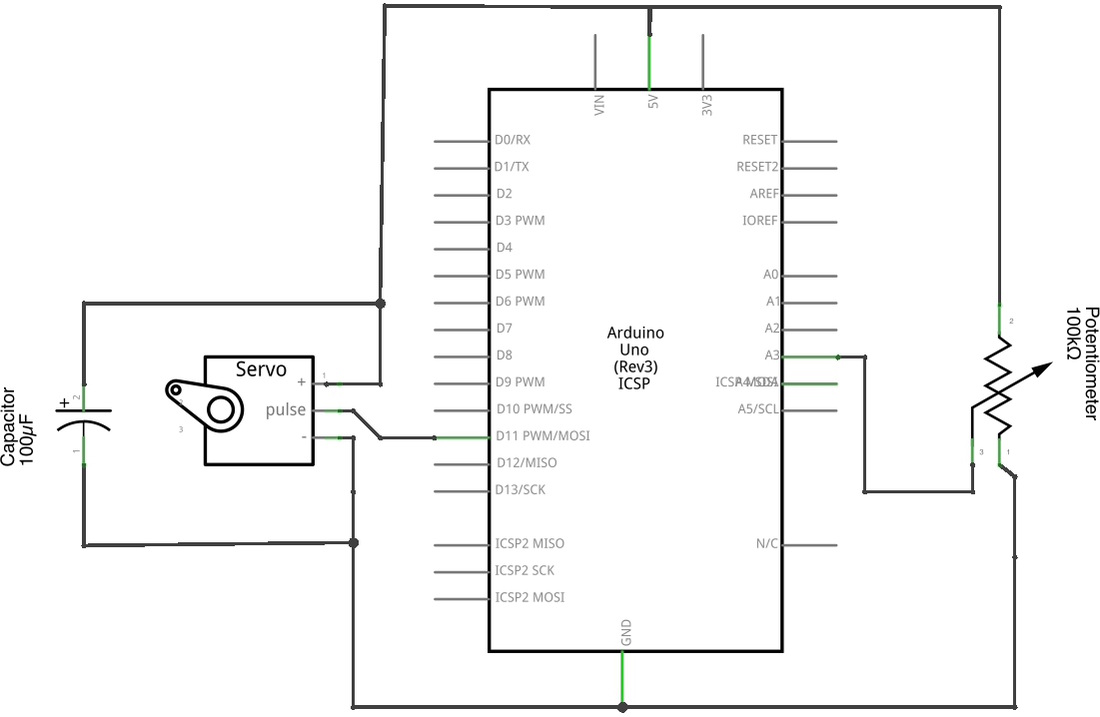
You will assemble a position controlled servomotor, using a potentiometer
Software Discovery: Analog Read, Serial Monitor, PWM, Libraries
Other Discovery: Potentiometer, Decoupling capacitor
Qty Part
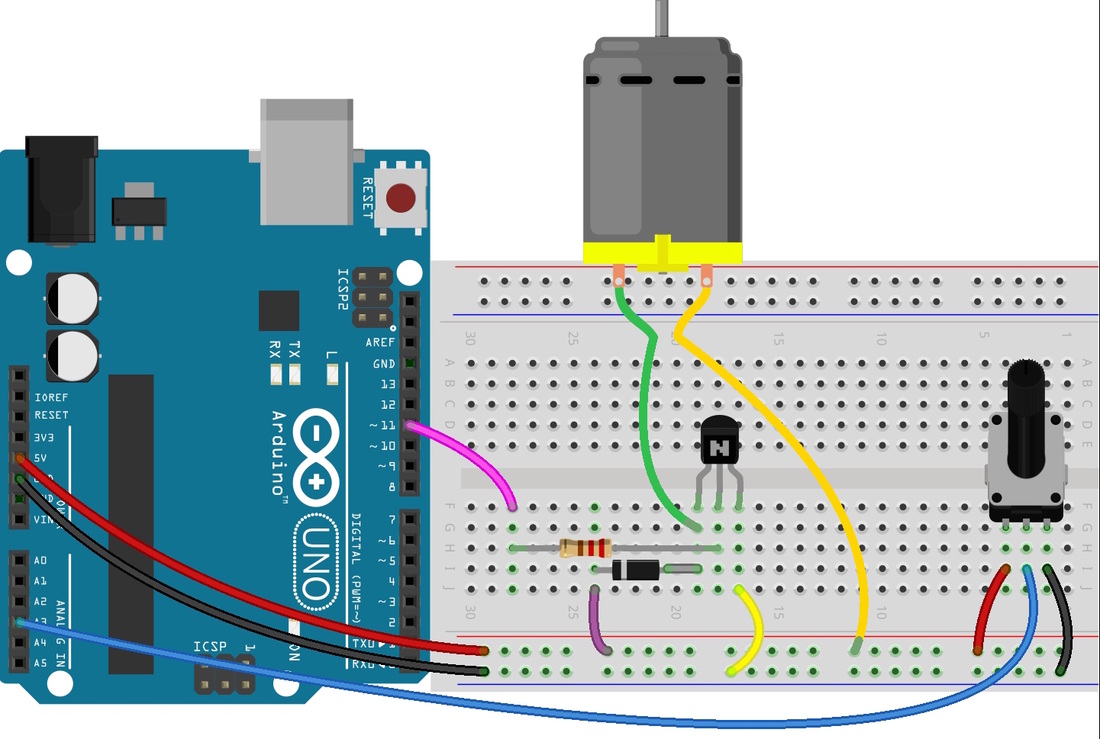
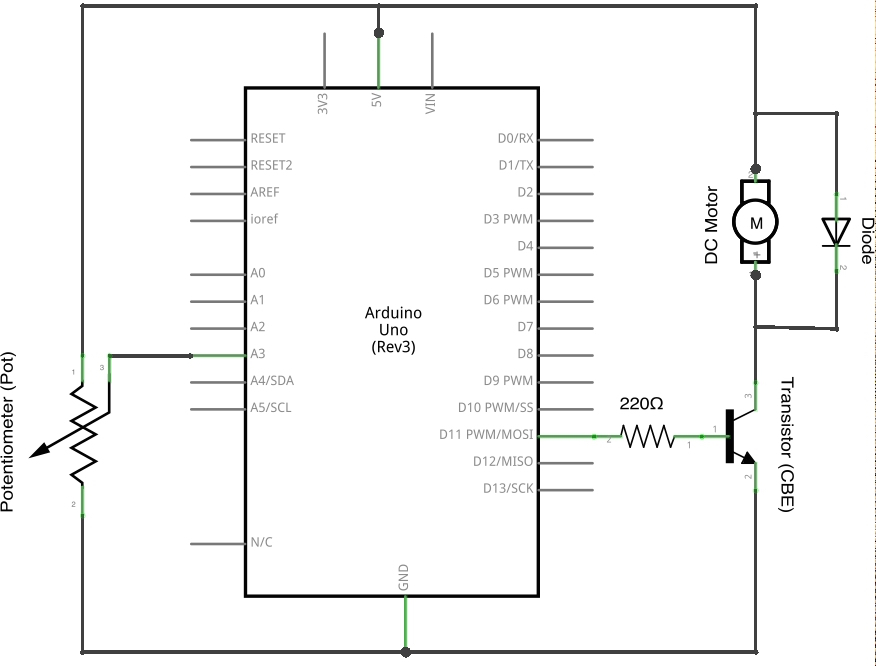
1 Servo motor
1 Potentiometer [10kΩ]
1 Capacitor [470μF]
Software Discovery: Analog Read, Serial Monitor, PWM, Libraries
Other Discovery: Potentiometer, Decoupling capacitor
Qty Part
1 Servo motor
1 Potentiometer [10kΩ]
1 Capacitor [470μF]
| Lets get Coding! Calibration In a position (or precision) control application, calibration is necessary. Each servomotor is calibrated differently. A user need to know where is the centre position lies. This calibration exercise will determine the 90 degrees position of the servomotor. #include <Servo.h> Servo calibrateServo; const int servoPin = 11; int pos = 0; void setup() { calibrateServo.attach(servoPin); calibrateServo.writeMicroseconds(1500); delay(3000); } void loop() { } | With Position Control <coming soon> |